27. Оценка точности городских геод. сетей, предназн-х для целей кадастра
|
∆х3 |
∆y3 | |
|
Vβ1 |
a31 |
b31 |
|
Vβ2 |
-a32 |
-b32 |
|
Vβ3 |
a32 -a31 |
b32 -b31 |
|
VS |
Cosα13 |
Sinα13 |
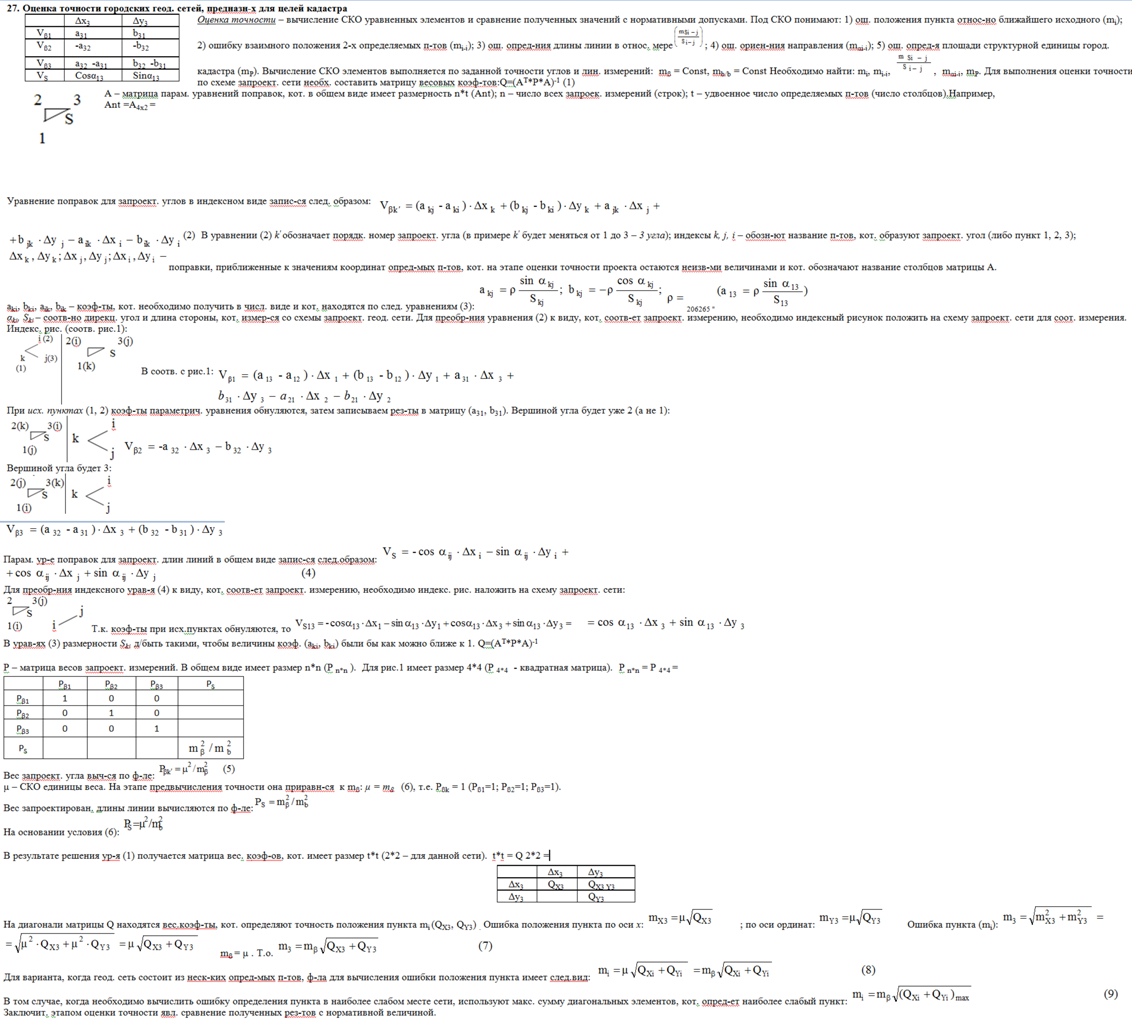
Оценка
точности – вычисление СКО
уравненных элементов и сравнение полученных значений с нормативными допусками.
Под СКО понимают: 1) ош. положения пункта относ-но ближайшего исходного
(mi); 2) ошибку взаимного положения 2-х определяемых п-тов
(mi-j); 3) ош.
опред-ния длины линии в относ. мере![]() ; 4) ош. ориен-ния направления (mαi-j); 5) ош.
опред-я площади структурной единицы город. кадастра (mР). Вычисление
СКО элементов выполняется по заданной точности углов и лин. измерений: mβ =
Const,
mb/b =
Const
Необходимо найти: mi, mi-j,
; 4) ош. ориен-ния направления (mαi-j); 5) ош.
опред-я площади структурной единицы город. кадастра (mР). Вычисление
СКО элементов выполняется по заданной точности углов и лин. измерений: mβ =
Const,
mb/b =
Const
Необходимо найти: mi, mi-j, ![]() , mαi-j, mР. Для
выполнения оценки точности по схеме запроект. сети необх. составить матрицу
весовых коэф-тов:Q=(AT*P*A)-1 (1)
, mαi-j, mР. Для
выполнения оценки точности по схеме запроект. сети необх. составить матрицу
весовых коэф-тов:Q=(AT*P*A)-1 (1)
![]() A – матрица парам. уравнений поправок, кот. в общем виде
имеет размерность n*t (Ant); n – число всех запроек. измерений (строк); t – удвоенное число
определяемых п-тов (число столбцов).Например,
A – матрица парам. уравнений поправок, кот. в общем виде
имеет размерность n*t (Ant); n – число всех запроек. измерений (строк); t – удвоенное число
определяемых п-тов (число столбцов).Например,
Ant =А4x2 =
Уравнение поправок для запроект.
углов в индексном виде запис-ся след. образом: ![]()
![]() (2) В уравнении (2)
k'
обозначает порядк. номер запроект.
угла (в примере k' будет
меняться от 1 до 3 – 3 угла);
индексы k,
j,
i – обозн-ют
название п-тов, кот. образуют запроект. угол (либо пункт 1, 2, 3);
(2) В уравнении (2)
k'
обозначает порядк. номер запроект.
угла (в примере k' будет
меняться от 1 до 3 – 3 угла);
индексы k,
j,
i – обозн-ют
название п-тов, кот. образуют запроект. угол (либо пункт 1, 2, 3); ![]() поправки, приближенные к значениям координат
опред-мых п-тов, кот. на этапе оценки точности проекта остаются неизв-ми
величинами и кот. обозначают название столбцов матрицы А.
поправки, приближенные к значениям координат
опред-мых п-тов, кот. на этапе оценки точности проекта остаются неизв-ми
величинами и кот. обозначают название столбцов матрицы А.
akj, bkj,
aik, bik –
коэф-ты, кот. необходимо получить в числ. виде и кот. находятся по след.
уравнениям (3): ![]()
![]()
![]() 206265 "
206265 "![]()
αkj, Skj – соотв-но дирекц. угол и длина стороны, кот. измер-ся со схемы запроект. геод. сети. Для преобр-ния уравнения (2) к виду, кот. соотв-ет запроект. измерению, необходимо индексный рисунок положить на схему запроект. сети для соот. измерения. Индекс. рис. (соотв. рис.1):
![]()
![]() В соотв. с
рис.1:
В соотв. с
рис.1: ![]()
При исх. пунктах (1, 2) коэф-ты параметрич. уравнения обнуляются, затем записываем рез-ты в матрицу (a31, b31). Вершиной угла будет уже 2 (а не 1):
![]()
![]()
![]()
Вершиной угла будет 3:
![]()
![]()
![]()
Парам. ур-е поправок для запроект.
длин линий в общем виде запис-ся след.образом: ![]()
![]()
Для преобр-ния индексного урав-я (4) к виду, кот. соотв-ет запроект. измерению, необходимо индекс. рис. наложить на схему запроект. сети:
![]()
![]() Т.к.
коэф-ты при исх.пунктах обнуляются, то
Т.к.
коэф-ты при исх.пунктах обнуляются, то ![]()
![]()
В урав-ях (3) размерности Skj д/быть такими, чтобы величины коэф. (akj, bkj) были бы как можно ближе к 1. Q=(AT*P*A)-1
Р – матрица весов запроект. измерений. В общем виде имеет размер n*n (Р n*n ). Для рис.1 имеет размер 4*4 (Р 4*4 - квадратная матрица). Р n*n = Р 4*4 =
|
Рβ1 |
Рβ2 |
Рβ3 |
РS | |
|
Рβ1 |
1 |
0 |
0 | |
|
Рβ2 |
0 |
1 |
0 | |
|
Рβ3 |
0 |
0 |
1 | |
|
РS |
|
Вес запроект. угла выч-ся по ф-ле:
![]()
μ – СКО единицы веса. На этапе предвычисления точности она приравн-ся к mβ: μ = mβ (6), т.е. Рβk = 1 (Рβ1=1; Рβ2=1; Рβ3=1).
Вес запроектирован. длины линии
вычисляются по ф-ле:![]()
На основании условия (6): ![]()
В результате решения ур-я (1) получается матрица вес. коэф-ов, кот. имеет размер t*t (2*2 – для данной сети). t*t = Q 2*2 =
|
∆х3 |
∆y3 | |
|
∆х3 |
QX3 |
QX3 Y3 |
|
∆y3 |
QY3 |
На диагонали матрицы Q находятся
вес.коэф-ты, кот. определяют точность положения пункта mi
(QX3, QY3) .
Ошибка положения пункта по оси х:
![]() ; по оси ординат:
; по оси ординат: ![]() Ошибка пункта (mi):
Ошибка пункта (mi): ![]()
![]() mβ
= μ . Т.о.
mβ
= μ . Т.о. ![]()
Для варианта, когда геод. сеть
состоит из неск-ких опред-мых п-тов, ф-ла для вычисления ошибки положения пункта
имеет след.вид: ![]()
В том случае, когда необходимо
вычислить ошибку определения пункта в наиболее слабом месте сети, используют
макс. сумму диагональных элементов, кот. опред-ет наиболее слабый пункт: ![]()
Заключит. этапом оценки точности явл. сравнение полученных рез-тов с нормативной величиной.